I'll explain it like I like to do it.
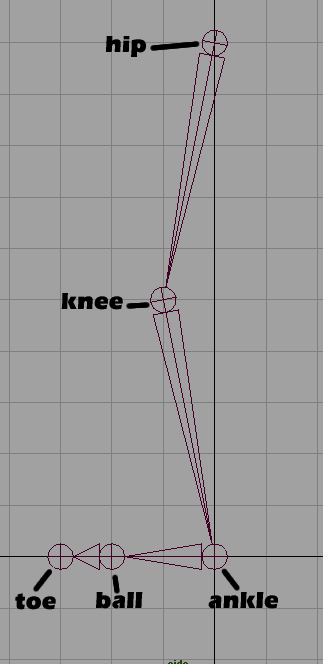
First you need a leg:
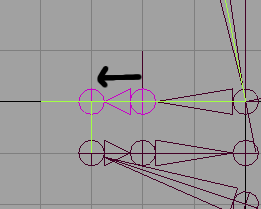
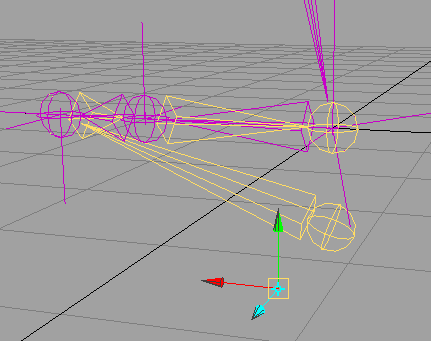
now you need an inverse foot, its built in the 'opposite direction',
starting with an 'imaginary' lower-ankle (I call this inv_foot)
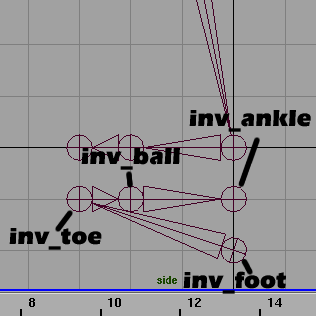 |
make sure that the distance between the individual joints matches the
original leg, I made both with grid-snap on, so it was simple, you could
also use vertex-snap whn you make inv_toe,inv_ball and inv_ankle and snap
them to the original joints, then move them down a bit afterwards so they
are easy to select.
|
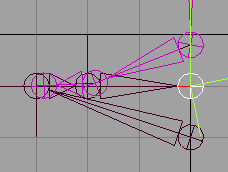
Next you need to put ik-handles on your 'real' leg and foot:
 |
Here I used a SC (Single Chain) solver, but you might aswell use a
RP (RotatePlane) solver, in fact this would give you much more control
of then legs movement, especially the knee.
It goes from the 'hip' to the 'ankle' |
 |
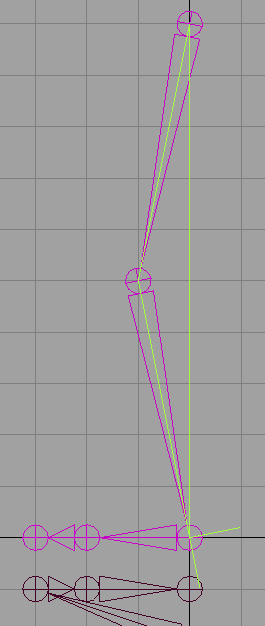
Next create a SC ik handle from the 'ankle' to the 'ball' |
 |
Then a ik handle from the ball to the toe.
Now the leg and foot is completely controlled by the 3 ik handles |
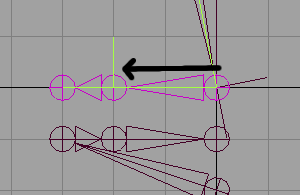
Now the inverse foot get into action, to make this work you need to
constrain each of the ikhandles in turn to its corresponding inverse-foot
joint.
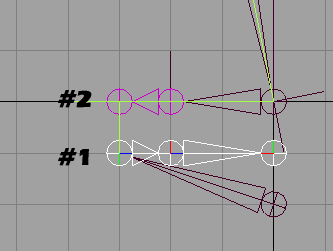 |
First select the joint to constrain to #1 (in this example the inv_toe
joint)
Then select the ik handle to constrain #2. |
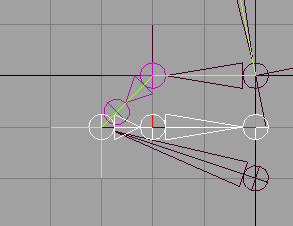 |
Then do a Constrain->PointConstrain.
The result should look like this. |
Repeat this for the final two ik-handle/joint pairs:
 |
 |
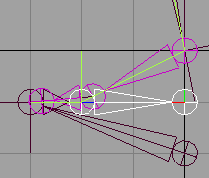
Now the setup is actually finished, the i just move the inverse_foot up a bit to make the foot 'lie' flat on the ground (x-z plane):
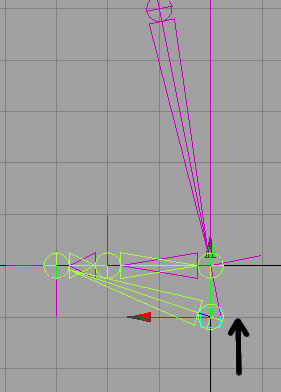
Now test the setup:
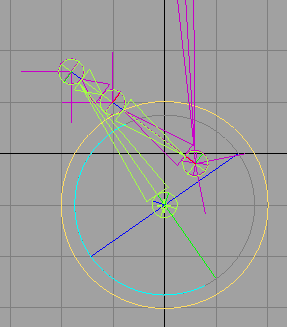 |
you can rotate the inverse_foot |
 |
you can rotate the inverse_toe |
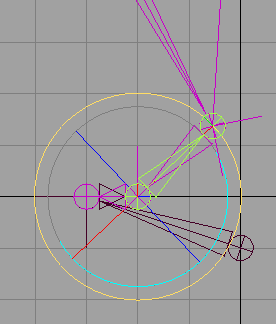 |
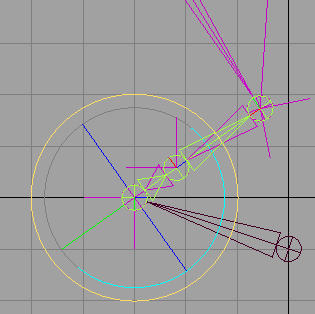
and finally you can roate the inverse_ball.
NOTE!
|
I usually turn on the SelectionHandle for the inverse_foot
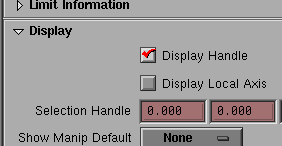
Then I go into component mode and selects the handle

Then I move it a little 'out' and down to make it easy to select the
inverse_foot node
Then sometimes I do this for the inverse_toe and inverse_ball, aswell
, and simply do animation by keyframing rotation.
This gives good flexibility (you can make the foot flex etc.)
Other times I setup two extra attributes on the inverse_foot node, a
toe-roll ans ball-rool attribute, then I use 'SetDrivenKey' to let there
two control the roll (rotation) of the twon nodes, this has the advantage
that all foot animation happen on the inverse_foot node. But is slightly
less flexible.